Precision Touch Design
Zoals je op mijn site kan lezen ben ik één van de pianotechnici in Nederland die gebruik maakt van Precision Touch Design (PTD). Dit is kort gezegd een methode ontwikkeld door David Stanwood om vleugel mechanieken inzichtelijk te maken, te verbeteren en/of perfectioneren.
Deze methode word door klanten of collega’s wel eens gezien als “abracadabra”. Vaak omdat de materie extra vaardigheden vergt die pianotechnici niet vanuit de vakschool, leerbedrijf of fabriek mee gegeven wordt. Het is een relatief nieuwe methode en zoals je misschien wel weet is de piano-industrie diep geworteld in ambachtelijke tradities. Zoals een bekent gezegde luid: “Wat de boer niet kent, dat eet hij niet”
In deze 4-delige blog ga ik de materie uit leggen. Dat probeer ik te doen op een manier dat een niet-pianotechnicus ook snapt wat de voordelen zijn. De methode is te gebruiken voor vleugel mechanieken, maar met de inzichten van PTD kan er ook veel verbeterd en geperfectioneerd worden aan staande pianomechanieken.
Deze blogs zijn geen handleiding of PTD-cursus, maar geven slechts inzicht in de methode en de voordelen.
Deel 1. Overbrengingsverhoudingen
In bijna alles wat beweegt is een overbrengingsverhouding te vinden. Een simpel voorbeeld is een wip in de speeltuin, Een andere vorm is bijvoorbeeld een kruiwagen. We houden het simpel en ik ga eerst uitleggen wat een overbrengingsverhouding is en wat hij kan.
Op fig. 1 zie je een klassieke wip.  Het internet heeft mij geleerd dat iedereen van katten houd, dus ik heb de wip voor de vorm voorzien van twee van deze dieren. Als beide katten hetzelfde gewicht hebben en het kantelpunt zich in het midden van de wip bevind, dan is de wip in balans. De wip heeft een overbrengingsverhouding van 1 op 1 (1:1)
Het internet heeft mij geleerd dat iedereen van katten houd, dus ik heb de wip voor de vorm voorzien van twee van deze dieren. Als beide katten hetzelfde gewicht hebben en het kantelpunt zich in het midden van de wip bevind, dan is de wip in balans. De wip heeft een overbrengingsverhouding van 1 op 1 (1:1)
Op fig. 2 heb ik een subtiele aanpassing gedaan. We hebben nu te maken met een chagrijnige kat, want zijn opponent is geen fijne wip-partner. De olifant heeft duidelijk meer massa en de wip is niet meer in balans. Ik wil dit oplossen voor de kat en ga op zoek naar een oplossing. Ik kan er drie bedenken;
We hebben nu te maken met een chagrijnige kat, want zijn opponent is geen fijne wip-partner. De olifant heeft duidelijk meer massa en de wip is niet meer in balans. Ik wil dit oplossen voor de kat en ga op zoek naar een oplossing. Ik kan er drie bedenken;
Oplossing 1
Bij fig. 3 heb ik een hoop gewicht (massa) toegevoegd in de vorm van katten. De wip is in balans, maar vanwege de grote massa aan beiden kanten krijg ik te maken met massa-traagheid en is het wippen een logge bezigheid geworden.
Oplossing 2
Bij fig. 4 heb ik het kantelpunt van de wip (overbrenging) aangepast en heb ik in vergelijking met fig. 3 minder last van massa-traagheid. Het nadeel aan deze oplossing is dat de olifant niet heel hoog meer komt en de kat daarentegen flinke afstanden af moet leggen om de olifant in beweging te krijgen. Ook dit is dus geen fijne wip beweging. De overbrengingsverhouding bij dit plaatje is veranderd naar ongeveer 1 op 4 (1:4). 1 lengte aan de ene kant van de wip staat tegenover 4 lengtes aan de andere kant.
Oplossing 3 
Bij fig. 5 heb ik gekeken wat de oorzaak was van het wip-probleem. De oorzaak was de te zware olifant. Ik heb een groot gedeelte van de massa van de olifant afgenomen zodat de wip weer in balans is. De olifant was er niet blij mee, maar er kan weer fijn gewipt worden. De overbrenging is 1:1 gebleven.
Tot zover vrij makkelijk te volgen toch? Geen hogere wiskunde lijkt mij..
Ratio in het speelmechanisme
De term die we in de pianotechniek gebruiken voor overbrengingsverhouding is “Ratio“. Het speelmechanisme van de vleugel zit vol met ratio’s. Klassieke ratio’s en wat minder gebruikelijke. De drie belangrijkste zie je in de plaatjes hieronder. De groene pijl geeft aan waar de kracht in het onderdeel komt, de rode driehoek geeft het draaipunt aan en de oranje pijl geeft de kracht aan die ik terug krijg.

De toets heeft het meeste weg van een simpele wip. De ratio is vaak rond de 2:1. De toets aan de voorkant van het kantelpunt is dus ongeveer 2 keer zo lang als daarachter.

De onderhamer heeft wat weg van een kruiwagen. De verhoudingen zitten beiden aan 1 kant van het draaipunt.

Ook de bovenhamer heeft het kruiwagen principe en is verreweg de grootste versnelling.
De bovengenoemde onderdelen zitten bij een mechaniek als puzzelstukjes in elkaar. In het plaatje hieronder heb ik alle onderdelen weer in elkaar geschoven. Als ik alle bovengenoemde verhoudingen bij elkaar op tel krijg ik de totale ratio van het mechaniek. 
Nu kan ik theoretisch een lineaal langs mijn mechaniek houden en de ratio meten, maar in de praktijk pakt dat lastig uit. Buiten dat het erg lastig is om een lineaal tussen het mechaniek te proppen, zijn niet alle maten goed af te lezen op een lineaaltje. Een foutje is te snel gemaakt om precies te kunnen werken. Gelukkig geeft natuurkunde de oplossing en kan je in plaats van meten met lengtes ook meten met gewicht. Later meer daarover.
Zo’n mechaniek is leuk maar niet echt overzichtelijk. Ik maak het dus weer wat kleiner. Als ik al deze overbrengingen optel en weer terugvertaal naar een simpele wip krijg ik zoiets:
Voor de beeldvorming heb ik de olifant vervangen door een hamerkop en de kat vervangen door mijn favoriete pianovinger.
Dit is ongeveer de ratio van een modern vleugelmechaniek. Deze zit (afhankelijk van het mechaniek) tussen de 1:4.6 en 1:7.5
De ratio van een mechaniek wordt in de meeste pianofabrieken niet berekend, maar komt in veel gevallen door het “trial and error”principe tot stand. De overbrenging kan dus van instrument tot instrument verschillen en dit is één van de redenen waarom iedere vleugel anders aanvoelt en klinkt.
De overbrengingsverhouding berekenen
Het is leuk dat ik weet dat een mechaniek een ratio heeft, maar hoe bereken ik die?
Ik ga weer even terug naar mijn simpele wip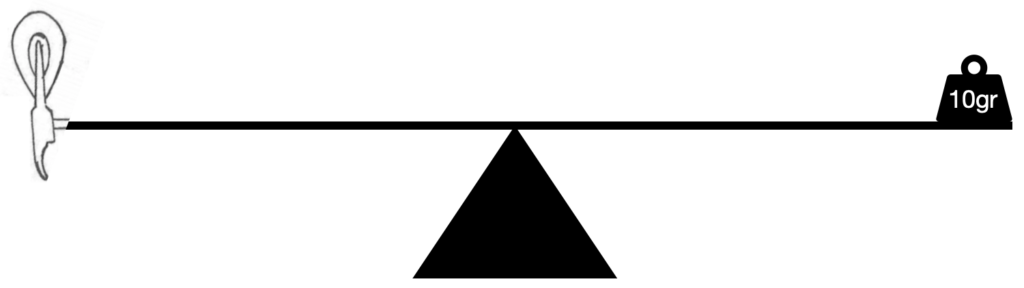
Van het bovenstaande plaatje weet ik dat de hamerkop 10 gram weegt en van het gewichtjes weet ik dat ook. De wip is mooi in balans dus is de ratio 1 op 1 (1:1)
Nu verschuif ik mijn kantelpunt (ratio).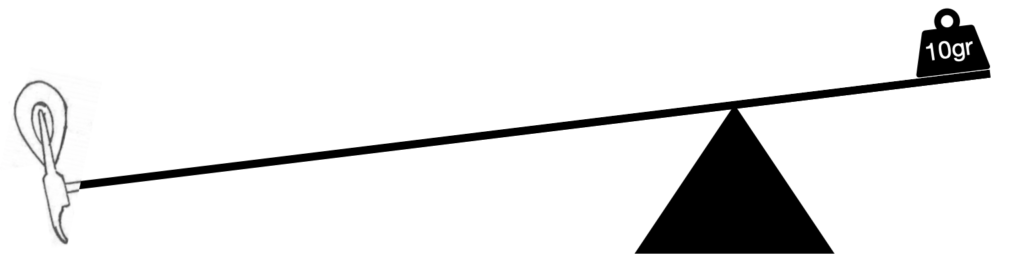
Ik weet nog steeds dat de hamerkop aan de linkerkant 10 gram is, maar door het verschuiven van het kantelpunt is mijn gewichtje aan de rechterkant niet meer voldoende om de wip ik balans te brengen.
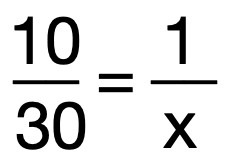
Ik voeg gram voor gram gewicht toe en ik stop wanneer de wip weer in balans is. Nu krijg ik het volgende plaatje.
Bij 30 gram is de wip weer in balans. Dat is 3 keer zoveel gewicht als de hamerkop. Dit betekend dat de ratio 1:3 is geworden. Door simpel de gewichten te vereenvoudigen komen wij achter die ratio.
Simpel vertaald naar het mechaniek. Een vleugelmechaniek is een opeenstapeling van ratio’s. Uiteindelijk heb ik aan de ene kant van het mechaniek het gewicht van de hamerkop en aan de andere kant een gewicht nodig op de toets waarmee de gehele toets in balans blijft staan.
Nog steeds geen hogere wiskunde toch?
Ratio aanpassen
Wanneer de ratio te hoog of te laag is voor een mechaniek bewaar ik even totdat ik mijn PTD-puzzel compleet heb. Ik kan wel vast verklappen wat er moet gebeuren als de ratio niet in orde is.
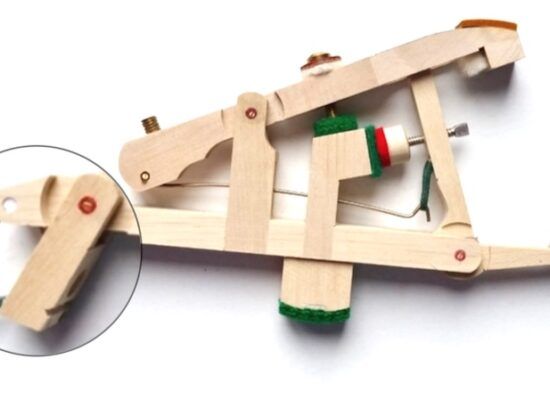
Er zijn verschillende manieren om de ratio van een mechaniek aan te passen. Ik heb ze genummerd in het plaatje hieronder.

De eerste manier is het verplaatsen van de roulette. Een kleine verplaatsing van deze roulette heeft een flinke verandering op de ratio. Dit is erg bewerkelijk en komt in de praktijk niet veel voor.
Manier 2 is het verplaatsen van de piloot. Voordeel van deze verplaatsing is dat je de arm van de toets en de onderhamer tegelijkertijd aanpast. Met een millimeter verplaatsing kan ik de ratio behoorlijk veranderen.



Manier 3 is het verplaatsen van het kantelpunt van de toets. Deze kan ik verplaatsen door de vilten of papieren moes die onder de toetsen ligt te knippen. De toets kantelt dan niet over de gehele moes, maar over een gedeelte. Dit is een goede manier om kleine aanpassingen te doen aan de ratio.



In deel 2 van deze blog ga ik op zoek naar het “balansgewicht” van mijn vleugelmechaniek. Bij die zoektocht kom ik ook een nieuwe variabele tegen.